Conexão de cabos à fonte de alimentação e ao RCM
Esta seção descreve as conexões de cabo na fonte de alimentação, no RCM e na unidade de arrefecimento opcional. Para as descrições dos conectores e seus locais, consulte Fontes de potência X5 400 e 500 e Robot Connectivity Module (RCM).
Para obter informações sobre como conectar o cabo de aterramento de proteção, consulte Conexão do fio PE (aterramento de proteção) (opcional).
Para obter informações sobre conexão do módulo Fieldbus, consulte Instalação do módulo fieldbus.
|
1.
|
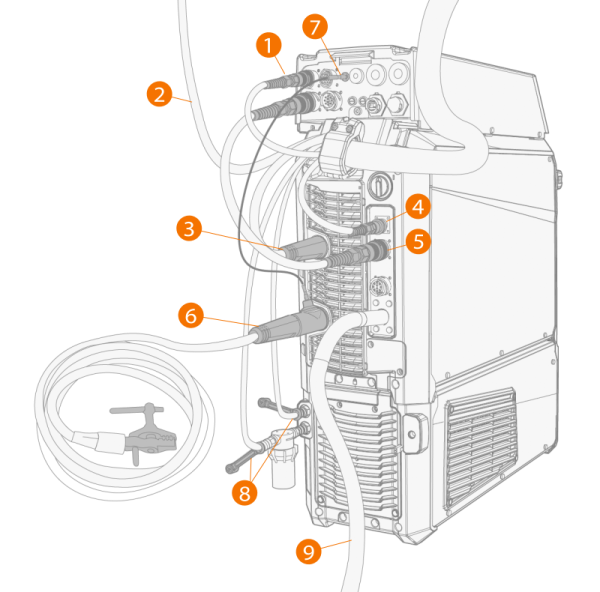
Conecte o cabo de controle do alimentador de arame (1) ao RCM. |
|
2.
|
Conecte a mangueira de gás de proteção (2) ao reservatório de gás. |
|
3.
|
Conecte o cabo de corrente de soldagem (3) ao conector positivo (+) na fonte de alimentação. |
|
4.
|
Apenas fonte de alimentação Pulse+: Se o cabo de detecção de tensão estiver em uso, ligue-o ao conector (4). |
|
5.
|
Conecte o cabo de controle do RCM (5) entre o RCM e a fonte de alimentação. |
|
6.
|
Conecte o cabo de retorno do terra (6) ao conector negativo (-) da fonte de alimentação. |
|
7.
|
Conecte o cabo do sensor de toque ao conector negativo (-) do sensor de toque no RCM (7). |
|
8.
|
Se você tiver a unidade de arrefecimento opcional, conecte as mangueiras (8) do líquido arrefecedor. Observe que o filtro do líquido arrefecedor deve ser conectado ao conector de entrada do líquido arrefecedor. Para obter informações sobre como conectar o filtro, consulte Instalação da unidade de resfriamento (opcional). |
|
9.
|
Conecte o cabo de alimentação (9) à rede elétrica após a conclusão da instalação. |