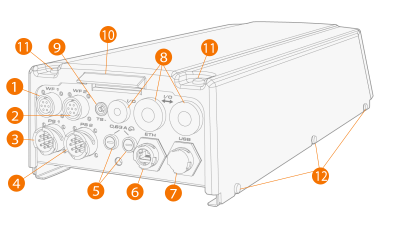
Robot Connectivity Module (RCM)
O Robot Connectivity Module (RCM) lida com a comunicação entre o sistema de soldagem e o robô.
Para conectar os cabos, consulte Conexão de cabos à fonte de alimentação e ao RCM.
|
1.
|
Conector do cabo de controle do alimentador de arame |
|
2.
|
Reservado para uso futuro |
|
3.
|
Conector do cabo de controle da fonte de alimentação |
|
4.
|
Reservado para uso futuro |
|
6.
|
Porta Ethernet 1 (LAN 1) |
|
8.
|
Entrada de cabo (com passa fios) |
|
9.
|
Conector negativo (-) do sensor de toque |
|
10.
|
Entrada de cabo com braçadeira de cabo |
|
11.
|
Parafusos de fixação da tampa |
|
12.
|
Furos de alinhamento e parafusos (para fixar a tampa no lugar). |
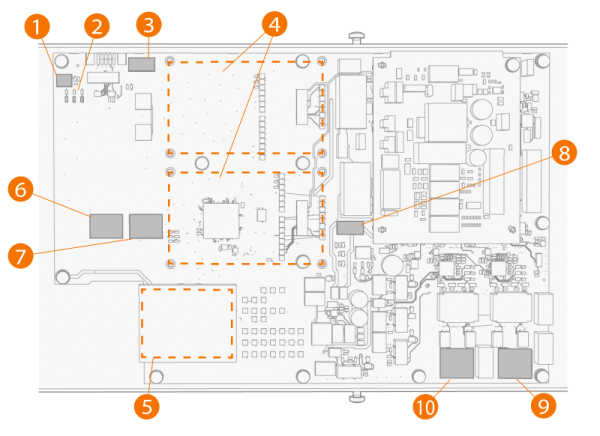
Dentro do RCM
|
3.
|
Terminal de saída rápida do sensor de toque |
|
4.
|
Slots para placas complementares |
|
5.
|
Slot para módulo fieldbus |
|
6.
|
Terminal do interruptor da porta |
|
7.
|
Terminal do interruptor de parada |
|
8.
|
Terminal da fonte de alimentação de backup |
|
9.
|
Porta Ethernet 1 (LAN 1) |
|
10.
|
Porta Ethernet 2 (LAN 2). |