Robotinstellingen
De robotinstellingen zijn toegankelijk via het instellingenscherm in AX Manager. De inhoud van het scherm varieert afhankelijk van de communicatiemodus van de robot.
Instellingen
| Parameter | Parameterwaarde | Omschrijving |
|---|---|---|
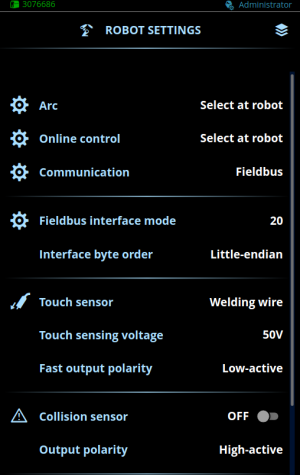
| Boog | Simulatie / Selecteren op robot Standaard = Selecteren op robot |
Wanneer de simulatie is ingeschakeld, kan de boog niet worden gevestigd. Selecteer of je wilt dat de simulatie wordt ingeschakeld of laat de robot de keuze maken. |
| Online controle | UIT / Selecteer op robot | In de online bedieningsmodus regelt de robot de waarden van bepaalde parameters rechtstreeks. Kies of je de online controle wilt uitschakelen of de robot de selectie wilt laten maken. Raadpleeg Online controle voor meer informatie. |
| Communicatie | Veldbus / Digitale robotbesturing / Analoge robotbesturing Standaard = Fieldbus |
Bepaalt of de communicatie met de robot plaatsvindt via een veldbus of met een digitale robotbesturing of analoge robotbesturing. |
| Fieldbusinterfacemodus | 1 ... 99 Standaard = 20 |
Identificeert de fieldbusbesturingstabel die moet worden gebruikt (zie Fieldbusbesturingstabellen). |
| Interface-bytevolgorde | Little-endian / Big-endian Standaard = Little-endian |
Bytevolgorde in de fieldbusbesturingstabel. |
| Contactsensor | Lasdraad / Gasmondstuk / Selecteren op robot Standaard = Selecteren op robot |
Contactmeting wordt gebruikt tijdens het zoeken naar lasnaden. Selecteer of een lasdraad of gasmondstuk wordt gebruikt voor contactmeting of laat de robot dit selecteren. Als u het gasmondstuk selecteert voor contactmeting, verbindt u pin F van de randapparaatconnector van de draadaanvoerunit met het gasmondstuk door middel van een aparte kabel (zie Randapparaatconnector draadaanvoerunit). |
| - Spanning contactmeting | 50 V / 80 V / 110 V / 150 V / 160 V 170 V / 180 V / 200 V Standaard = 50 V |
De uitgangsspanning die wordt gebruikt door de contactsensor. Zie Spanningsniveaus contactmeting voor meer informatie over spanningsniveaus voor contactmeting. |
| - Polariteit snelle uitgang | Laagactief / Hoogactief Standaard = Hoogactief |
Uitgangspolariteit voor snelle uitgang van de contactsensor. Uitgangsgedrag bij laagactieve uitgangspolariteit: Laag = Contact waargenomen Hoog = Geen contact waargenomen Uitgangsgedrag bij hoogactieve uitgangspolariteit: Laag = Geen contact waargenomen Hoog = Contact waargenomen |
| Botsingssensor | UIT/AAN Standaard = UIT |
De botsingssensor beschermt de pistoolhals tegen buigen en beschadiging door contact met een obstakel. De botsingssensor stuurt een signaal naar de robot om te stoppen met lassen wanneer een botsing wordt gedetecteerd bij de laskop. |
| - Uitgangspolariteit | Laagactief / Hoogactief Standaard = Laagactief |
Signaalgedrag bij laagactieve uitgangspolariteit: 0 = Botsing gedetecteerd 1 = Geen botsing gedetecteerd Signaalgedrag bij hoogactieve uitgangspolariteit: 0 = Geen botsing gedetecteerd 1 = Botsing gedetecteerd |
| Voor- en nagasregeling | Geheugenkanaal / Selecteer op robot Standaard = Geheugenkanaal |
Deze instelling bepaalt of de voor- en nagastijden worden bestuurd door het geheugenkanaal of door de robot. Raadpleeg Voor- en nagasregeling voor meer informatie. |
| Gasstroomsensor (alleen in modellen R500 Wire Feeder EUR+) | UIT/AAN Standaard = UIT |
Gasstroomsensor wordt gebruikt voor het meten van de stroomsnelheid van het beschermgas. Wanneer de gasstroomsensor is ingesteld op UIT, is de gasstroomstatus OK. Wanneer de gasstroomsensor is ingesteld op AAN, worden de gemeten waarden tijdens het lassen weergegeven op de statusschermen Home, Tools en Robot. |
| - Gasstroomfout | UIT/AAN Standaard = UIT |
Indien ingesteld op UIT, geeft het lassysteem geen foutmelding, ook al bevindt de gasdoorstroomsnelheid zich onder het detectieniveau. Indien ingesteld op AAN, geeft het lassysteem een foutmelding als de gasdoorstroomsnelheid onder het detectieniveau ligt en wordt het lassen gestopt. |
| - Meetniveau | 5.0 L/min ... 20.0 L/min Standaard = 10,0 l/min |
Als de gasdoorstroomsnelheid zich onder het detectieniveau bevindt en Gasstroomfout is ingesteld op AAN, geeft het lassysteem een foutmelding en wordt het lassen gestopt. |
| - Gastype | CO2 / Argon / Ar+8%CO2 / Ar+18%CO2 Stanaard = Ar+18%CO2 |
Het gastype dat wordt gebruikt voor het lassen. |
| - Starttijd sensor | 0,1 s ... 5,0 s Standaard = 3,0 sec |
Starttijd gassensor wanneer de gasstroomsensor AAN staat. |
| Wire Stuck detectie | AAN / UIT / selecteer op robot Standaard = AAN |
Dit bepaalt of er een controle wordt gedaan om te detecteren of de lasdraad aan de las vastzit. Als deze functie AAN staat, wordt de controle vanzelf aan het einde van elke las uitgevoerd. Als deze functie UIT staat, vindt er geen controle plaats. Als u de instelling 'Selecteren op robot' kiest, vraagt de robot de Wire Stuck controle aan (zie Besturingsgegevens besturing). Het resultaat van de Wire Stuck controle ziet u in de statusweergave van de robot (zie Robotstatus). |
| Spanning naar robot | Boog / Terminal Standaard = Terminalspanning |
Dit bepaalt welke spanning aan de robot wordt getoond, boogspanning of terminalspanning. |
| Watchdog | UIT/AAN Standaard = UIT |
Wanneer watchdog is ingeschakeld, moet de robot de watchdog-bit periodiek omschakelen. Als de robot stopt met het omschakelen van de watchdog-bit, geeft het lassysteem een foutmelding en wordt het lassen gestopt. |
| - Watchdog-time-out | 0.1 ... 5.0 s | Time-out voor het omschakelen van de watchdog-bit. |