Connexion des câbles à la source d'alimentation et au RCM
Cette section décrit les connexions des câbles dans le poste à souder, le RCM et l'unité de refroidissement en option. Pour la description des connecteurs et leur emplacement, voir X5 Power Source 400 et 500 et Robot Connectivity Module (RCM).
Pour plus d'informations sur le raccordement du câble de mise à la terre de protection, voir Raccordement du câble PE (protection par la terre) (facultatif).
Pour plus d'informations sur le raccordement du module de bus de terrain, voir Installation du module de bus de terrain.
|
1.
|
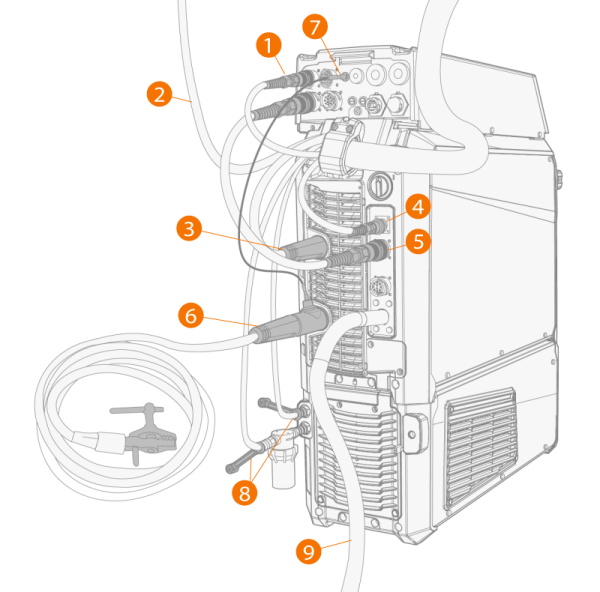
Raccorder le câble de commande du dévidoir (1) au RCM. |
|
2.
|
Raccorder le tuyau du gaz de protection (2) à la bouteille de gaz. |
|
3.
|
Raccorder le câble de courant de soudage (3) au connecteur positif (+) du poste à souder. |
|
4.
|
Poste à souder Pulse+ uniquement : Si vous utilisez le câble détecteur de tension, le raccorder au connecteur (4). |
|
5.
|
Raccorder le câble de commande du RCM (5) entre le RCM et le poste à souder. |
|
6.
|
Raccorder le câble de masse (6) au connecteur négatif (-) du poste à souder. |
|
7.
|
Raccorder le câble du capteur tactile au connecteur négatif (-) du capteur tactile dans le RCM (7). |
|
8.
|
Avec l'unité de refroidissement en option : placer les connecteurs des tuyaux de liquide de refroidissement (8) dans la fente et à travers l'ouverture. Notez que le filtre de liquide de refroidissement doit être fixé au connecteur d'entrée de liquide de refroidissement. Pour plus d'informations sur la fixation du filtre, voir Installation du refroidisseur (en option). |
|
9.
|
Raccorder le câble secteur (9) au secteur une fois l'installation terminée. |