Configurações do robô
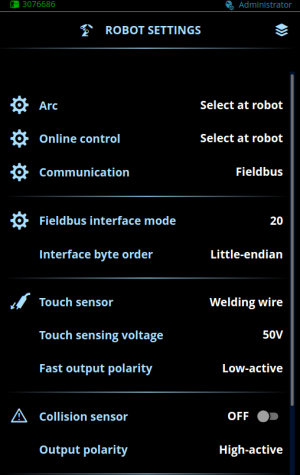
As configurações do robô podem ser acessadas no menu da visualização Configurações no AX Manager. O conteúdo da visualização varia dependendo do modo de comunicação do robô.
Configurações
| Parâmetro | Valor do parâmetro | Descrição |
|---|---|---|
| Arco | Simulação/Selecionar no robô Padrão = Selecionar no robô |
Quando a simulação está ativada, o arco não pode ser estabelecido. Selecione se deseja forçar a ativação da simulação ou deixar o robô fazer a seleção. |
| Controle online | DESLIGADO/Selecionar no robô | No modo de controle online, o robô controla diretamente os valores de determinados parâmetros. Escolha se deseja forçar o controle online a ser desligado ou deixar o robô fazer a seleção. Para mais informações, consulte Controle online. |
| Comunicação | Fieldbus/Controle robótico digital/Controle robótico analógico Padrão = Fieldbus |
Determina se a comunicação com o robô ocorre através de um fieldbus ou com um controle robótico digital ou com um controle robótico analógico. |
| Modo de interface do fieldbus | 1 ... 99 Padrão = 20 |
Identifica a tabela de controle do fieldbus a ser usada (consulte Tabelas de controle do Fieldbus). |
| Ordem de bytes da interface | Little-endian/Big-endian Padrão = Little-endian |
Ordem dos bytes na tabela de controle do fieldbus. |
| Sensor de toque | Arame de soldagem/Bico de gás /Selecionar no robô Padrão = Selecionar no robô |
O sensor de toque é usado para pesquisa de emendas. Selecione se o arame de enchimento ou bico de gás é usado para detecção de toque. Como alternativa, deixe o robô fazer a seleção. Se você selecionar o bico de gás para a detecção de toque, conecte o pino F do conector periférico do alimentador de arame ao bico de gás com um cabo separado (consulte Conector periférico do alimentador de arame). |
| - Tensão do sensor de toque | 50 V/80 V/110 V/150 V/160 V/170 V/180 V/200 V Padrão = 50 V |
A tensão de saída usada pelo sensor de toque. Para obter informações sobre níveis de tensão do sensor de toque, consulte Níveis de tensão do sensor de toque. |
| - Polaridade da saída rápida | Baixa-ativa/Alta-ativa Padrão = Alta-ativa |
Polaridade de saída para a saída rápida do sensor de toque. Comportamento de saída na polaridade da saída baixa-ativa: Baixa = Toque detectado Alta = Toque não detectado Comportamento de saída na polaridade da saída alta-ativa: Baixa = Toque não detectado Alta = Toque detectado |
| Sensor de colisão | OFF/ON (LIGADO/DESLIGADO) Padrão = DESLIGADO |
O sensor de colisão protege o pescoço da pistola contra dobras e danos causados pelo impacto com obstáculos. O sensor de colisão envia um sinal ao robô para interromper a soldagem quando uma colisão é detectada no cabeçote de soldagem. |
| - Polaridade da saída | Baixa-ativa/Alta-ativa Padrão = Baixa-ativa |
Comportamento do sinal na polaridade da saída baixa-ativa: 0 = Colisão detectada 1 = Nenhuma colisão foi detectada Comportamento do sinal na polaridade da saída alta-ativa: 0 = Nenhuma colisão foi detectada 1 = Colisão detectada |
| Controles pré e pós-gás | Canal de memória/Selecionar no robô Padrão = Canal de memória |
Esta configuração determina se os tempos de pré e pós-gás são controlados pelo canal de memória ou pelo robô. Para mais informações, consulte Controles pré e pós-gás. |
| Sensor de fluxo de gás (apenas nos modelos R500 Wire Feeder EUR+) | OFF/ON (LIGADO/DESLIGADO) Padrão = DESLIGADO |
O sensor de fluxo de gás é usado para medir a vazão do gás de proteção. Quando o sensor de fluxo de gás está definido como desativado, o status do fluxo de gás é OK. Quando o sensor de fluxo de gás está definido como ativo, os valores medidos são mostrados nas visualizações Início, Ferramentas e Status do robô durante a soldagem. |
| - Erro de fluxo de gás | DESLIGADO/LIGADO Padrão = DESLIGADO |
Quando definido como desativado, o sistema de soldagem não apresenta erro, mesmo que a vazão de gás esteja abaixo do nível de detecção. Quando definido como ativado e a vazão de gás estiver abaixo do nível de detecção, o sistema de soldagem apresentará um erro e a soldagem será interrompida. |
| - Nível de detecção | 5,0 L/min ... 20,0 L/min Padrão = 10,0 l/min |
Se o fluxo de gás estiver abaixo do nível de detecção e o erro de fluxo de gás estiver definido como ativado, o sistema de soldagem apresentará um erro e a soldagem será interrompida. |
| - Tipo de gás | CO2/Argônio/Ar+8%CO2/Ar+18%CO2 Padrão = Ar+18%CO2 |
O tipo de gás usado para soldagem. |
| - Hora de início do sensor | 0,1 s...5,0 s Padrão = 3,0 s |
Hora de início do sensor de gás quando o sensor de fluxo de gás está ativado. |
| Detecção de arame preso | LIGADO/DESLIGADO/Selecionar no robô Padrão = LIGADO |
Determina se uma verificação de arame preso é realizada para detectar se o arame de enchimento está preso à solda. Quando esta função está ativada, a verificação de arame preso é feita automaticamente ao final de cada solda. Quando esta função está desativada, nenhuma verificação de arame preso é feita. Quando definida como Selecionar no robô, o robô solicita a verificação de arame preso (consulte Informações de controle). O resultado da verificação de arame preso é mostrado na exibição Status do robô (consulte Status do robô). |
| Tensão para o robot | Arco / Terminal Padrão = Tensão terminal |
Isto define qual a tensão que é mostrada ao robot, a tensão no arco ou no terminal. |
| Watchdog | OFF/ON (LIGADO/DESLIGADO) Padrão = DESLIGADO |
Quando o watchdog está ativado, o robô deve alternar o bit do watchdog periodicamente. Se o robô parar de alternar o bit do watchdog, o sistema de soldagem apresentará um erro e a soldagem será interrompida. |
| - Tempo limite do watchdog | 0.1 ... 5,0 s | Tempo limite para alternar o bit do watchdog. |