Controles pré e pós-gás
Por padrão, o AX MIG Welder utiliza os tempos de pré e pós-gás definidos nos canais de memória. Entretanto, o robô pode substituir esses valores para usar tempos de gás mais longos que os tempos máximos disponíveis no AX Manager.
As seções a seguir descrevem os diferentes cenários para controle pré e pós-gás.
Cenário 1: Pré e pós-gás controlado por canal de memória
No cenário 1, um canal de memória controla os tempos de pré e pós-gás. Esse cenário requer uma das seguintes configurações:
| a. | a configuração "Controle pré e pós-gás" deve estar definida como "Canal de memória" (consulte Configurações do robô) |
| b. | a configuração "Controle pré e pós-gás" deve estar definida como "Robô", mas o bit de controle "GasBlow" não é controlado pelo robô durante o ciclo de soldagem. |
A sequência de fases do ciclo de soldagem é a seguinte:
| 1. | O robô define o bit de controle "StartWelding" para o estado 1: o fluxo de pré-gás controlado por canal de memória é iniciado. |
| 2. | Uma vez decorrido o tempo de pré-gás controlado pelo canal de memória, o arco acende e a soldagem inicia. |
| 3. | O robô define o bit de controle "StartWelding" para o estado 0: a soldagem termina, e o fluxo de pós-gás controlado por canal de memória inicia. |
| 4. | Uma vez decorrido o tempo de pós-gás controlado por canal de memória, a válvula de gás fecha e o fluxo de pós-gás termina. |
Figura 1: Pré e pós-gás controlado por canal de memória
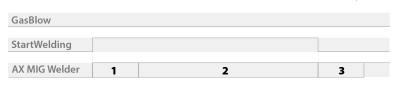
| Item | Descrição |
|---|---|
| 1 | Pré-gás controlado por canal de memória |
| 2 | Soldagem |
| 3 | Pós-gás controlado por canal de memória |
Cenário 2: Pré e pós-gás controlados por robô
No cenário 2, o robô controla os tempos de pré e pós-gás. Esse cenário requer as seguintes configurações:
| • | a configuração "Controle pré e pós-gás" deve estar definida como "Robô" (consulte Configurações do robô) |
| • | o robô controla o bit de controle "GasBlow" durante o ciclo de soldagem. |
A sequência de fases do ciclo de soldagem é a seguinte:
| 1. | O robô define o bit de controle "GasBlow" para o estado 1: a válvula de gás abre, e o fluxo de pré-gás controlado pelo robô é iniciado. |
| 2. | Uma vez decorrido o tempo de pré-gás controlado pelo robô, o robô define o bit de controle "StartWelding" para o estado 1: o arco acende, e a soldagem começa. |
| 3. | O robô define o bit de controle "StartWelding" para o estado 0: o arco é desligado, a soldagem termina, e o pós-fluxo de gás controlado pelo robô é iniciado. |
| 4. | Uma vez decorrido o tempo de pós-gás controlado pelo robô, o robô define o bit de controle "GasBlow" para o estado 0: a válvula de gás fecha, e o fluxo de pós-gás termina. |
Figura 2: Pré e pós-gás controlados por robô
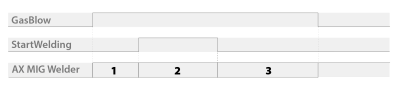
| Item | Descrição |
|---|---|
| 1 | Pré-gás controlado pelo robô |
| 2 | Soldagem |
| 3 | Pós-gás controlado pelo robô |
Cenário 3: Pré-gás controlado pelo robô e pós-gás controlado por canal de memória
No cenário 3, o robô controla o tempo de pré-gás e um canal de memória controla o tempo de pós-gás.
Neste cenário, a configuração "Controle pré e pós-gás" deve estar definida como "Robô" (consulte Configurações do robô).
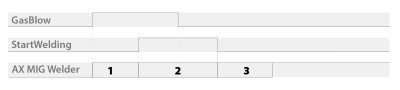
A sequência de fases do ciclo de soldagem é a seguinte:
| 1. | O robô define o bit de controle "GasBlow" para o estado 1: a válvula de gás abre, e o fluxo de pré-gás controlado pelo robô é iniciado. |
| 2. | Uma vez decorrido o tempo de pré-gás controlado pelo robô, o robô define o bit de controle "StartWelding" para o estado 1: o arco acende, e a soldagem começa. |
| 3. | Durante a soldagem, o robô define o bit de controle "GasBlow" para o estado 0 para ativar o pós-gás controlado por canal de memória. |
| 4. | O robô define o bit de controle "StartWelding" para o estado 0: o arco é desligado, a soldagem termina, e o pós-fluxo de gás controlado por canal de memória é iniciado. |
| 5. | Uma vez decorrido o tempo de pós-gás controlado por canal de memória, a válvula de gás fecha e o fluxo de pós-gás termina. |
Figura 3: Pré-gás controlado pelo robô e pós-gás controlado por canal de memória
| Item | Descrição |
|---|---|
| 1 | Pré-gás controlado pelo robô |
| 2 | Soldagem |
| 3 | Pós-gás controlado por canal de memória |
Cenário 4: Pré-gás controlado por canal de memória e pós-gás controlado pelo robô
No cenário 4, um canal de memória controla o tempo de pré-gás e o robô controla o tempo de pós-gás.
Neste cenário, a configuração "Controle pré e pós-gás" deve estar definida como "Robô" (consulte Configurações do robô).
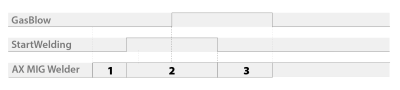
A sequência de fases do ciclo de soldagem é a seguinte:
| 1. | O robô define o bit de controle "StartWelding" para o estado 1: a válvula de gás abre, e o fluxo de pré-gás controlado por canal de memória é iniciado. |
| 2. | Uma vez decorrido o tempo de pré-gás controlado pelo canal de memória, o arco acende e a soldagem inicia. |
| 3. | Durante a soldagem, o robô define o bit de controle "GasBlow" para o estado 1 para ativar o pós-gás controlado por robô. |
| 4. | O robô define o bit de controle "StartWelding" para o estado 0: O arco é desligado, a soldagem termina, e o pós-fluxo de gás controlado por robô inicia e continuará enquanto o bit de controle "GasBlow" estiver no estado 1. |
| 5. | Uma vez decorrido o tempo de pós-gás controlado pelo robô, o robô define o bit de controle "GasBlow" para o estado 0: a válvula de gás fecha, e o fluxo de pós-gás termina. |
Figura 4: Pré-gás controlado por canal de memória e pós-gás controlado pelo robô
| Item | Descrição |
|---|---|
| 1 | Pré-gás controlado por canal de memória |
| 2 | Soldagem |
| 3 | Pós-gás controlado pelo robô |