Ajustes de robot
Se puede acceder a la configuración de robot a través del menú Ajustes en AX Manager. El contenido de la vista varía según el modo de comunicación del robot.
Configuración
| Parámetro | Valor del parámetro | Descripción |
|---|---|---|
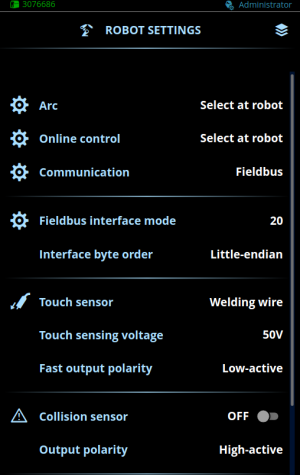
| Arco | Simulación / Seleccionar en robot Predeterminado = Seleccionar en robot |
Cuando la simulación está activada, no se puede establecer el arco. Seleccione si desea forzar la activación de la simulación o dejar que el robot haga la selección. |
| Control en línea | OFF / Seleccionar en robot | En el modo de control en línea el robot controla directamente los valores de determinados parámetros. Seleccione si desea forzar el control en línea a estar apagado o dejar que el robot haga la selección. Consulte la sección Control en línea para obtener más información. |
| Comunicación | Bus de campo / Control digital de robot / Control de robot analógico Predeterminado = Bus de campo |
Determina si la comunicación con el robot se realiza a través de un bus de campo o con un control de robot digital o analógico. |
| Modo de interfaz de bus de campo | 1 ... 99 Predeterminado = 20 |
Identifica la tabla de control de bus de campo que se utilizará (consulte Tablas de control de bus de campo). |
| Orden de bytes de la interfaz | Little-endian / Big-endian Predeterminado = Little-endian |
Orden de bytes en la tabla de control de bus de campo. |
| Sensor táctil | Alambre de soldadura / Boquilla de gas / Seleccionar en el robot Predeterminado = Seleccionar en robot |
El sensor de contacto se utiliza para la búsqueda de costuras. Selecciona si se utiliza alambre de relleno o boquilla de gas para la detección táctil o deje que el robot lo seleccione. Si selecciona la boquilla de gas para la detección táctil, conecte el pin F del conector periférico del alimentador de alambre a la boquilla de gas con un cable separado (consulte Conector periférico del alimentador de alambre). |
| - Voltaje de sensor táctil | 50 V / 80 V / 110 V / 150 V / 160 V 170 V / 180 V / 200 V Predeterminado = 50 V |
El voltaje de salida utilizado por el sensor táctil. Para obtener información sobre los niveles de voltaje en el sensor táctil, consulte Niveles de voltaje de sensor táctil. |
| - Polaridad de salida rápida | Baja actividad / Alta actividad Predeterminado = Alto activo |
Polaridad de salida para la salida rápida del sensor táctil. Comportamiento de salida en polaridad de salida activa baja: Bajo = Contacto detectado Alto = Contacto no detectado Comportamiento de salida en polaridad de salida activa alta: Bajo = Contacto no detectado Alto = Contacto detectado |
| Sensor de colisión | OFF/ON Predeterminado = OFF |
El sensor de colisión protege el cuello de la pistola para que no se doble y se dañe al golpear un obstáculo. El sensor de colisión envía una señal al robot para que deje de soldar cuando se detecta una colisión en el cabezal de soldadura. |
| - Polaridad de salida | Baja actividad / Alta actividad Predeterminado = Activo bajo |
Comportamiento de señal en polaridad de salida activa baja: 0 = Colisión detectada 1 = No se detectó ninguna colisión Comportamiento de señal en polaridad de salida activa alta: 0 = No se detectó ninguna colisión 1 = Colisión detectada |
| Control pregás y posgás | Canal de memoria / Seleccionar en robot Predeterminado = Canal de memoria |
Esta configuración determina si los tiempos de pregás y posgás están controlados por el canal de memoria o por el robot. Consulte la sección Control pregás y posgás para obtener más información. |
| Sensor de flujo de gas (solo en los modelos R500 Wire Feeder EUR+) | OFF/ON Predeterminado = OFF |
El sensor de flujo de gas se utiliza para medir el flujo de gas de protección. Cuando el sensor de flujo de gas está OFF, el estado del flujo de gas es OK. Cuando el sensor de flujo de gas está ON, los valores medidos se muestran en las vistas de estado Inicio, Herramientas y Robot durante la soldadura. |
| - Error de flujo de gas | OFF/ON Predeterminado = OFF |
Cuando está OFF, el sistema de soldadura no da un error incluso si el flujo de gas está por debajo del nivel de detección. Cuando se configura en ON y el flujo de gas está por debajo del nivel de detección, el sistema de soldadura da un error y se detiene la soldadura. |
| - Nivel de detección | 5.0 L/min ... 20.0 L/min Predeterminado = 10,0 L/min |
Si el flujo de gas está bajo el nivel de sensor y el error de flujo de gas está ON, el sistema de soldadura da un error y se detiene la soldadura. |
| - Tipo de gas | CO2 / Argón / Ar+8%CO2 / Ar+18%CO2 Predeterminado = Ar+18%CO2 |
El tipo de gas utilizado para soldar. |
| - Hora de inicio del sensor | 0,1 s ... 5,0 s Predeterminado = 3,0 s |
Hora de inicio del sensor de gas cuando el sensor de flujo de gas está ON. |
| Detección de alambres atascados | ON / OFF / Seleccionar en robot Predeterminado = ON |
Esto determina si se realiza una comprobación de alambre atascado para detectar si el alambre de relleno está pegado a la soldadura. Cuando esta función está activada, la comprobación del alambre atascado se realiza automáticamente al final de cada soldadura. Cuando esta función está desactivada, no se realiza comprobación de alambre atascado. Cuando se establece en Seleccionar en el robot, el robot solicita la comprobación del alambre atascado (consulte Información de control). El resultado de la comprobación de alambre atascado se muestra en la vista de estado del robot (consulte Estado del robot). |
| Voltaje al robot | Arco / Terminal Predeterminado = Voltaje de terminal |
Define qué voltaje se muestra al robot, voltaje del arco o voltaje de terminal. |
| Watchdog | OFF/ON Predeterminado = OFF |
Cuando el mecanismo de vigilancia está habilitado, el robot debe alternar el bit de watchdog periódicamente. Si el robot deja de alternar el bit de watchdog, el sistema de soldadura da un error y se detiene la soldadura. |
| - Tiempo de espera de watchdog | 0.1 ... 5,0 s | Tiempo de espera para alternar el bit de watchdog. |