Control pregás y posgás
De forma predeterminada, AX MIG Welder utiliza los tiempos de pregás y posgás establecidos en los canales de memoria. Sin embargo, el robot puede anular estos valores para utilizar tiempos de gas más prolongados que los tiempos máximos disponibles en AX Manager.
Las siguientes secciones describen los diferentes escenarios para el control de pregás y posgás.
Escenario 1: Pregás y posgás controlados por canal de memoria
En el escenario 1, un canal de memoria controla los tiempos de pregás y posgás. Este escenario requiere cualquiera de las siguientes configuraciones:
| a. | el ajuste "Control de pregás y posgás" está configurado en 'Canal de memoria' (consulte Ajustes de robot) |
| b. | el ajuste "Control de pregás y posgás" está configurado en "Robot", pero el robot no controla el bit de control "GasBlow" durante el ciclo de soldadura. |
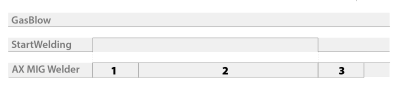
La secuencia de fases del ciclo de soldadura es la siguiente:
| 1. | El robot pone el bit de control "StartWelding" en el estado 1: Se inicia el flujo de pregás controlado por el canal de memoria. |
| 2. | Una vez transcurrido el tiempo de pregás controlado por el canal de memoria, se enciende el arco y se inicia la soldadura. |
| 3. | El robot pone el bit de control "StartWelding" en el estado 0: la soldadura finaliza y se inicia el flujo de posgás controlado por canal de memoria. |
| 4. | Una vez transcurrido el tiempo de posgás controlado por el canal de memoria, la válvula de gas se cierra y finaliza el flujo de posgás. |
Figura 1: Pregás y posgás controlados por canal de memoria
| Artículo | Descripción |
|---|---|
| 1 | Pregás controlado por canal de memoria |
| 2 | Soldadura |
| 3 | Posgás controlado por canal de memoria |
Escenario 2: Pregás y posgás controlados por robot
En el escenario 2, el robot controla los tiempos de pregás y posgás. Este escenario requiere las siguientes configuraciones:
| • | el ajuste "Control de pregás y posgás" está configurado en "Robot" (consulte Ajustes de robot) |
| • | El robot controla el bit de control "GasBlow" durante el ciclo de soldadura. |
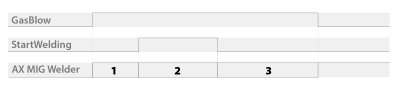
La secuencia de fases del ciclo de soldadura es la siguiente:
| 1. | El robot pone el bit de control "GasBlow" en el estado 1: La válvula de gas se abre y comienza el flujo de pregás controlado por robot. |
| 2. | Una vez transcurrido el tiempo de pregás controlado por el robot, el robot pone el bit de control "StartWelding" en el estado 1: el arco se enciende y la soldadura comienza. |
| 3. | El robot pone el bit de control "StartWelding" en el estado 0: se apaga el arco, finaliza la soldadura y se inicia el flujo de posgás controlado por robot. |
| 4. | Una vez transcurrido el tiempo de posgás controlado por el robot, el robot pone el bit de control "GasBlow" en el estado 0: la válvula de gas se cierra y finaliza el flujo de posgás. |
Figura 2: Pregás y posgás controlados por robot
| Artículo | Descripción |
|---|---|
| 1 | Pregás controlado por robot |
| 2 | Soldadura |
| 3 | Posgás controlado por robot |
Escenario 3: Pregás controlado por robot y posgás controlado por canal de memoria
En el escenario 3, el robot controla el tiempo de pregás y un canal de memoria controla el tiempo de posgás.
Este escenario requiere que el ajuste "Control de pregás y posgás" está configurado en "Robot" (consulte Ajustes de robot).
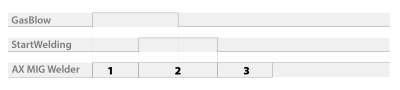
La secuencia de fases del ciclo de soldadura es la siguiente:
| 1. | El robot pone el bit de control "GasBlow" en el estado 1: La válvula de gas se abre y comienza el flujo de pregás controlado por robot. |
| 2. | Una vez transcurrido el tiempo de pregás controlado por el robot, el robot pone el bit de control "StartWelding" en el estado 1: el arco se enciende y la soldadura comienza. |
| 3. | Durante la soldadura, el robot establece el bit de control "GasBlow" en el estado 0 para habilitar el posgás controlado por el canal de memoria. |
| 4. | El robot pone el bit de control "StartWelding" en el estado 0: se apaga el arco, finaliza la soldadura y se inicia el flujo de posgás controlado por canal de memoria. |
| 5. | Una vez transcurrido el tiempo de posgás controlado por el canal de memoria, la válvula de gas se cierra y finaliza el flujo de posgás. |
Figura 3: Pregás controlado por robot y posgás controlado por canal de memoria
| Artículo | Descripción |
|---|---|
| 1 | Pregás controlado por robot |
| 2 | Soldadura |
| 3 | Posgás controlado por canal de memoria |
Escenario 4: Pregás controlado por canal de memoria y posgás controlado por robot
En el escenario 4, un canal de memoria controla el tiempo de pregás y el robot controla el tiempo de posgás.
Este escenario requiere que el ajuste "Control de pregás y posgás" está configurado en "Robot" (consulte Ajustes de robot).
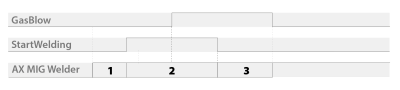
La secuencia de fases de un ciclo de soldadura es la siguiente:
| 1. | El robot pone el bit de control "StartWelding" en el estado 1: La válvula de gas se abre y comienza el flujo de pregás controlado por canal de memoria. |
| 2. | Una vez transcurrido el tiempo de pregás controlado por el canal de memoria, se enciende el arco y se inicia la soldadura. |
| 3. | Durante la soldadura, el robot establece el bit de control "GasBlow" en el estado 1 para habilitar el posgás controlado por el robot. |
| 4. | El robot pone el bit de control "StartWelding" en el estado 0: el arco se apaga, la soldadura finaliza y el flujo de posgás controlado por robot comienza y continúa mientras el bit de control "GasBlow" está en el estado 1. |
| 5. | Una vez transcurrido el tiempo de posgás controlado por el robot, el robot pone el bit de control "GasBlow" en el estado 0: la válvula de gas se cierra y se detiene el flujo de posgás. |
Figura 4: Pregás controlado por canal de memoria y posgás controlado por robot
| Artículo | Descripción |
|---|---|
| 1 | Pregás controlado por canal de memoria |
| 2 | Soldadura |
| 3 | Posgás controlado por robot |