Robotindstillinger
Robotindstillinger kan tilgås via menuvisningen Indstillinger i AX Manager. Indholdet af visningen varierer afhængigt af robotkommunikationstilstanden.
Indstillinger
| Parameter | Parameterværdi | Beskrivelse |
|---|---|---|
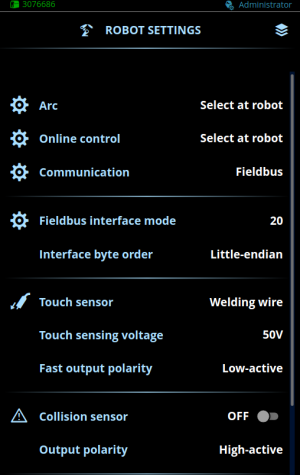
| Lysbue | Simulering/Vælg på robot Standard = Vælg på robot |
Når simuleringen er aktiveret, kan lysbuen ikke etableres. Vælg, hvis du vil tvinge simuleringen til at være aktiv, eller lad robotten foretage valget. |
| Onlinestyring | Slukket / Vælg på robot | I online styringstilstand styrer robotten værdierne af visse parametre direkte. Vælg, om du vil tvinge onlinestyringen til at være FRA, eller lad robotten foretage valget. Nærmere oplysninger findes i Onlinestyring. |
| Kommunikation | Feltbus / Digital robotstyring / Analog robotstyring Standard = Feltbus |
Bestemmer, om kommunikationen med robotten foregår via en feltbus eller med en digital robotstyring eller analog robotstyring. |
| Feltbus-interface-tilstand | 1 ... 99 Standard = 20 |
Identificerer den feltbusstyretabel, der skal anvendes (se Feltbusstyringstabeller). |
| Interface-byte-rækkefølge | Little-endian/Big-endian Standard = Little-endian |
Byterækkefølge i feltbusstyretabellen. |
| Berøringssensor | Svejsetråd/gaskop/vælg ved robot Standard = Vælg på robot |
Berøringsfølsomhed bruges til sømsøgning. Vælg, om svejsetråden eller gaskoppen skal bruges til berøringsføling, eller lad robotten vælge det. Hvis du vælger gaskoppen til berøringsføling, skal du forbinde ben F på trådboksens perifere stik til gaskoppen med et separat kabel (se Stik til trådboksens periferiudstyr). |
| - Berøringsfølingsspænding | 50 V/80 V/110 V/150 V/160 V 170 V/180 V/200 V Standard = 50 V |
Den udgangsspænding, der benyttes af berøringssensoren. Vedrørende oplysninger om spændingsniveauer for berøringsfølsomhed henvises til Berøringsfølingsspændingsniveauer. |
| - Hurtig udgangspolaritet | Lavaktiv/højaktiv Standard = Højaktiv |
Udgangspolaritet for berøringssensorens hurtige output. Udgangsadfærd for lavaktiv udgangspolaritet: Lav = Berøring registreret Høj = Berøring ikke registreret Udgangsadfærd for højaktiv udgangspolaritet: Lav = Berøring ikke registreret Høj = Berøring registreret |
| Kollisionssensor | TÆNDT/SLUKKET Standard = SLUKKET |
Kollisionssensor beskytter pistolhalsen mod bøjning og mod at blive beskadiget, hvis den rammer en forhindring. Kollisionssensoren sender et signal til robotten om at stoppe svejsningen, når der registreres en kollision ved svejsehovedet. |
| - Udgangspolaritet | Lavaktiv/højaktiv Standard = Lavaktiv |
Signaladfærd for lavaktiv udgangspolaritet: 0 = Kollision registreret 1 = Kollision ikke registreret Signaladfærd for højaktiv udgangspolaritet: 0 = Kollision ikke registreret 1 = Kollision registreret |
| Før- og eftergasstyring | Hukommelseskanal / Vælg på robot Standard = Hukommelseskanal |
Denne indstilling bestemmer, om for- og eftergastiderne styres af hukommelseskanalen eller robotten. Nærmere oplysninger findes i Før- og eftergasstyring. |
| Gasflowsensor (kun i R500 Wire Feeder EUR+-modeller) | TÆNDT/SLUKKET Standard = SLUKKET |
Gasflowsensor anvendes til at måle flowhastigheden for beskyttelsesgas. Når gasflowsensoren er indstillet til SLUKKET, er gasflowstatus OK. Når gasflowsensoren er indstillet til TÆNDT, vises de målte værdier i visningerne Hjem, Værktøjer og Robot under svejsning. |
| - Fejl i gasflow | TÆNDT/SLUKKET Standard = SLUKKET |
Når det er indstillet til SLUKKET, melder svejsesystemet ingen fejl, selvom gasflowhastigheden er under føleniveauet. Når det er indstillet til TÆNDT, og gasflowhastigheden er under føleniveau, melder svejsesystemet en fejl, og svejsningen stopper. |
| - Føleniveau | 5.0 L/min ... 20.0 L/min Standard = 10,0 L/min. |
Hvis gasflowet er under føleniveauet, og gasflowfejlen er indstillet til TÆNDT, melder svejsesystemet en fejl, og svejsningen stopper. |
| - Gastype | CO2/argon/Ar+8%CO2/Ar+18%CO2 Standard = Ar+18%CO2 |
Den gastype, der anvendes til svejsning. |
| - Sensorstarttid | 0,1 s ... 5,0 s Standard = 3,0 sek |
Gassensorens starttidspunkt, når gasflowsensoren er TÆNDT. |
| Registrering af fastsiddende svejsetråd | ON / OFF / Vælg på robot Standard = TÆNDT |
Dette afgør, om der skal udføres en kontrol af, om svejsetråden sidder fast i svejsningen. Når denne funktion er slået TIL, kontrolleres det automatisk efter hver svejsning, om tråden sidder fast. Når denne funktion er slået FRA, kontrolleres det ikke om tråden sidder fast. Når den er indstillet til Vælg med robot, anmoder robotten om at tjekke, om tråden sidder fast (se Betjeningsoplysninger). Resultatet af kontrollen af, om tråden sidder fast, vises i robottens statusvisning (se Robotstatus). |
| Spænding til robot | Lysbue / Terminal Standard = Terminalspænding |
Dette definerer, hvilken spænding der vises til robotten, lysbue- eller terminalspænding. |
| Watchdog | TÆNDT/SLUKKET Standard = SLUKKET |
Når watchdog er aktiveret, skal robotten skifte watchdog-bitten med jævne mellemrum. Hvis robotten holder op med at skifte watchdog-bitten, melder svejsesystemet en fejl, og svejsningen stopper. |
| - Watchdog-timeout | 0.1 ... 5.0 s | Timeout for skift af watchdog-bitten. |