Robot Connectivity Module (RCM) -robottiliitäntälaite
Hitsausjärjestelmän ja robotin välinen viestintä tapahtuu Robot Connectivity Module (RCM) -robottiliitäntälaitteen kautta.
Katso kaapelien kytkeminen kohdasta Kaapelien kytkeminen virtalähteeseen ja RCM-laitteeseen.
|
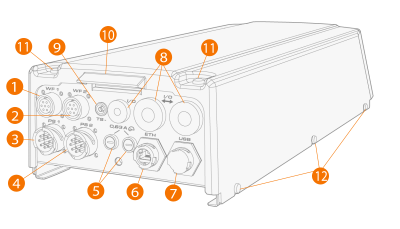
1.
|
Langansyöttölaitteen ohjauskaapelin liitin |
|
2.
|
Varattu tulevaa käyttöä varten |
|
3.
|
Virtalähteen ohjauskaapelin liitin |
|
4.
|
Varattu tulevaa käyttöä varten |
|
6.
|
Ethernet-portti 1 (LAN 1) |
|
8.
|
Kaapelin läpivienti (läpivientisuojuksella) |
|
9.
|
Kosketustunnistimen negatiivinen (-) liitäntä |
|
10.
|
Kaapelin läpivienti kaapelikiinnikkeellä |
|
11.
|
Kannen kiinnitysruuvit |
|
12.
|
Kohdistusreiät ja ruuvit (kannen kiinnittämiseksi paikalleen). |
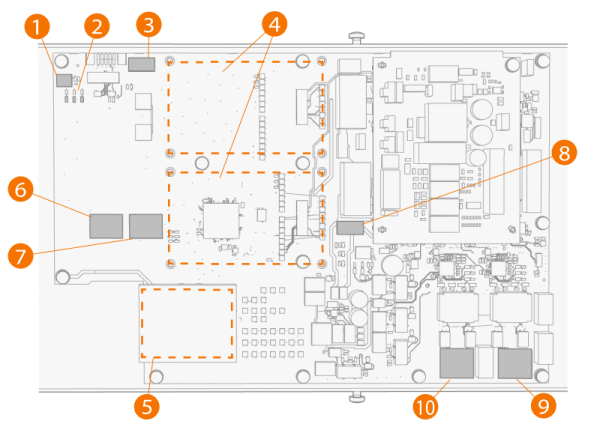
RCM-laite sisältä
|
1.
|
S1-painike (pakotettu tehdasasetusten palautus, lisätietoja on kohdassa Vianetsintä) |
|
3.
|
Kosketustunnistimen nopean lähdön liitäntä |
|
5.
|
Kenttäväylämoduulin paikka |
|
6.
|
Porttikytkimen liitäntä |
|
7.
|
Pysäytyskytkimen liitäntä |
|
8.
|
Varavirtalähteen liitäntä |
|
9.
|
Ethernet-portti 1 (LAN 1) |
|
10.
|
Ethernet-portti 2 (LAN 2). |