Deurschakelaar aansluiten (optioneel)
In dit gedeelte wordt beschreven hoe u een deurschakelaar aansluit op de RCM. De deurschakelaar kan worden gebruikt om het systeem te stoppen wanneer een poortdeur naar de robotcel wordt geopend. De RCM-deurschakelaarterminal is bedoeld voor deurschakelaars die twee normaal gesloten (NC) elektrische contacten hebben.

|
De deurschakelaar wordt niet bij het AX MIG Welder-systeem geleverd. |

|
Schakel de stroombron uit voordat u de deurschakelaar aansluit. |
Zie Bovenkap RCM verwijderen en bevestigen voor aanwijzingen voor het verwijderen en aanbrengen van de bovenkap van de RCM.
| 1. | Verwijder de in de fabriek geïnstalleerde jumperdraden om het gebruik van de deurschakelaarterminal mogelijk te maken. |
| 2. | Leid de kabel van de deurschakelaar door een kabelingang naar de RCM. (Zie Kabels naar RCM leiden voor meer informatie over kabelingangen.) |
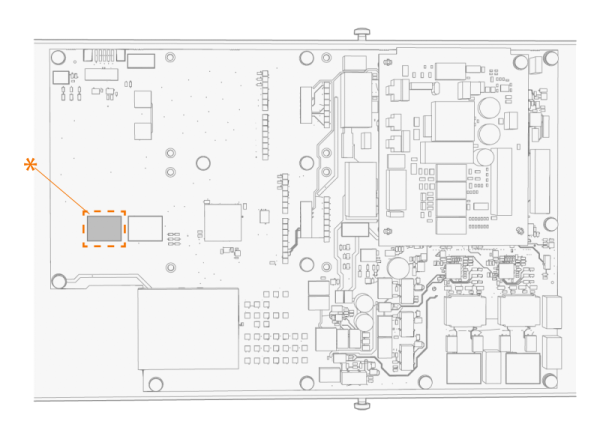
| 3. | Sluit de kabel van de deurschakelaar aan op de deurschakelaaraansluiting (*) op het moederbord van de RCM. |
|
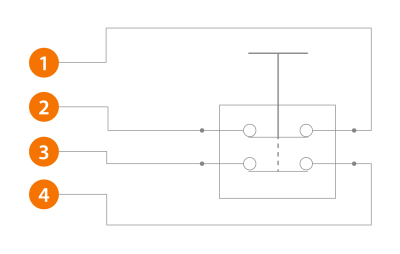
Terminalpinnen: 1. Kanaal 1 A 2. Kanaal 1 B 3. Kanaal 2 A 4. Kanaal 2 B |
Hier is een voorbeeld van de bedrading van een deurschakelaar:
|
|
Als u de deurschakelaar niet meer wilt gebruiken, bevestigt u de jumperdraden weer aan de terminalpinnen. |