Controllo pre-gas e post-gas
Per impostazione predefinita, AX MIG Welder utilizza i tempi pre-gas e post-gas impostati nei canali di memoria. Tuttavia, il robot può sovrascrivere questi valori per utilizzare tempi gas prolungati rispetto ai tempi massimi disponibili in AX Manager.
Le sezioni seguenti descrivono i diversi scenari per il controllo pre-gas e post-gas.
Scenario 1: Pre-gas e post-gas controllati dal canale di memoria
Nello scenario 1, un canale di memoria controlla sia i tempi pre-gas che quelli post-gas. Questo scenario richiede una delle impostazioni seguenti:
| a. | l'impostazione "Controllo pre-gas e post-gas" è impostata su "Canale di memoria" (vedere Impostazioni robot) |
| b. | l'impostazione "Controllo pre-gas e post-gas" è impostata su "Robot", ma il bit di controllo "GasBlow" non è controllato dal robot durante il ciclo di saldatura. |
La sequenza delle fasi del ciclo di saldatura è la seguente:
| 1. | Il robot imposta il bit di controllo "StartWelding" sullo stato 1: si avvia il flusso pre-gas controllato dal canale di memoria. |
| 2. | Trascorso il tempo pre-gas controllato dal canale di memoria, l'arco si accende e la saldatura ha inizio. |
| 3. | Il robot imposta il bit di controllo "StartWelding" sullo stato 0: la saldatura termina e si avvia il flusso post-gas controllato dal canale di memoria. |
| 4. | Al termine del tempo post-gas controllato dal canale di memoria, la valvola del gas si chiude e il flusso post-gas termina. |
Figura 1: Pre-gas e post-gas controllati dal canale di memoria
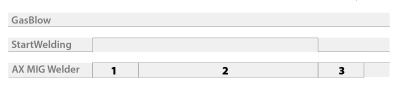
| Componente | Descrizione |
|---|---|
| 1 | Pre-gas controllato dal canale di memoria |
| 2 | Saldatura |
| 3 | Post-gas controllato dal canale di memoria |
Scenario 2: Pre-gas e post-gas controllati da robot
Nello scenario 2, il robot controlla sia i tempi pre-gas che quelli post-gas. Questo scenario richiede le impostazioni seguenti:
| • | l'impostazione "Controllo pre-gas e post-gas" è impostata su "Robot" (vedere Impostazioni robot) |
| • | Il robot controlla il bit di controllo "GasBlow" durante il ciclo di saldatura. |
La sequenza delle fasi del ciclo di saldatura è la seguente:
| 1. | Il robot imposta il bit di controllo "GasBlow" sullo stato 1: la valvola del gas si apre e inizia il flusso di pre-gas controllato dal robot. |
| 2. | Al termine del tempo pre-gas controllato dal robot, il robot imposta il bit di controllo "StartWelding" sullo stato 1: l'arco si accende e la saldatura ha inizio. |
| 3. | Il robot imposta il bit di controllo "StartWelding" sullo stato 0: l'arco si spegne, la saldatura termina e inizia il flusso post-gas controllato dal robot. |
| 4. | Al termine del tempo post-gas controllato dal robot, il robot imposta il bit di controllo "GasBlow" sullo stato 0: la valvola del gas si chiude e il flusso post-gas termina. |
Figura 2: Pre-gas e post-gas controllati da robot
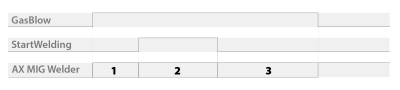
| Componente | Descrizione |
|---|---|
| 1 | Pre-gas controllato da robot |
| 2 | Saldatura |
| 3 | Post-gas controllato da robot |
Scenario 3: Pre-gas controllato da robot e post-gas controllato da canale di memoria
Nello scenario 3, il robot controlla il tempo pre-gas e un canale di memoria controlla il tempo post-gas.
Questo scenario richiede che l'impostazione "Controllo pre-gas e post-gas" sia impostata su "Robot" (vedere Impostazioni robot).
La sequenza delle fasi del ciclo di saldatura è la seguente:
| 1. | Il robot imposta il bit di controllo "GasBlow" sullo stato 1: la valvola del gas si apre e inizia il flusso di pre-gas controllato dal robot. |
| 2. | Al termine del tempo pre-gas controllato dal robot, il robot imposta il bit di controllo "StartWelding" sullo stato 1: l'arco si accende e la saldatura ha inizio. |
| 3. | Durante la saldatura, il robot imposta il bit di controllo "GasBlow" sullo stato 0 per abilitare il post-gas controllato dal canale di memoria. |
| 4. | Il robot imposta il bit di controllo "StartWelding" sullo stato 0: l'arco si spegne, la saldatura termina e inizia il flusso post-gas controllato dal canale di memoria. |
| 5. | Al termine del tempo post-gas controllato dal canale di memoria, la valvola del gas si chiude e il flusso post-gas termina. |
Figura 3: Pre-gas controllato da robot e post-gas controllato da canale di memoria
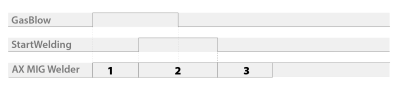
| Componente | Descrizione |
|---|---|
| 1 | Pre-gas controllato da robot |
| 2 | Saldatura |
| 3 | Post-gas controllato dal canale di memoria |
Scenario 4: Pre-gas controllato da canale di memoria e post-gas controllato da robot
Nello scenario 4, un canale di memoria controlla il tempo pre-gas e il robot controlla il tempo post-gas.
Questo scenario richiede che l'impostazione "Controllo pre-gas e post-gas" sia impostata su "Robot" (vedere Impostazioni robot).
La sequenza delle fasi di un ciclo di saldatura è la seguente:
| 1. | Il robot imposta il bit di controllo "StartWelding" sullo stato 1: la valvola del gas si apre e inizia il flusso di pre-gas controllato dal canale di memoria. |
| 2. | Trascorso il tempo pre-gas controllato dal canale di memoria, l'arco si accende e la saldatura ha inizio. |
| 3. | Durante la saldatura, il robot imposta il bit di controllo "GasBlow" sullo stato 1 per abilitare il post-gas controllato dal robot. |
| 4. | Il robot imposta il bit di controllo "StartWelding" sullo stato 0: l'arco si spegne, la saldatura termina e il flusso post-gas controllato dal robot inizia e continua finché il bit di controllo "GasBlow" si trova nello stato 1. |
| 5. | Al termine del tempo post-gas controllato dal robot, il robot imposta il bit di controllo "GasBlow" sullo stato 0: la valvola del gas si chiude e il flusso post-gas si interrompe. |
Figura 4: Pre-gas controllato da canale di memoria e post-gas controllato da robot
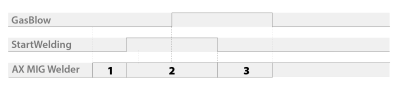
| Componente | Descrizione |
|---|---|
| 1 | Pre-gas controllato dal canale di memoria |
| 2 | Saldatura |
| 3 | Post-gas controllato da robot |