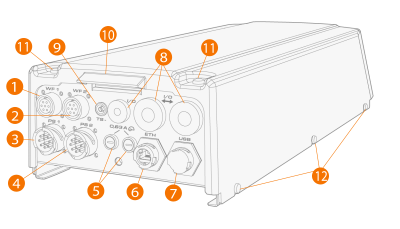
Módulo de conectividad de robots (RCM)
El módulo de conectividad del robot (RCM) gestiona la comunicación entre el sistema de soldadura y el robot.
Para conectar los cables, consulte Conectar los cables a la fuente de potencia y RCM.
|
1.
|
Conector del cable de control del alimentador de alambre |
|
2.
|
Reservado para su uso futuro |
|
3.
|
Conector del cable de control a la fuente de potencia |
|
4.
|
Reservado para su uso futuro |
|
6.
|
Puerto Ethernet 1 (LAN 1) |
|
8.
|
Entrada de cable (con pasacables) |
|
9.
|
Conector negativo (-) del sensor táctil |
|
10.
|
Entrada de cable con abrazadera de cable |
|
11.
|
Cubre tornillos de fijación |
|
12.
|
Orificios de alineación y tornillos (para asegurar la cubierta en su lugar). |
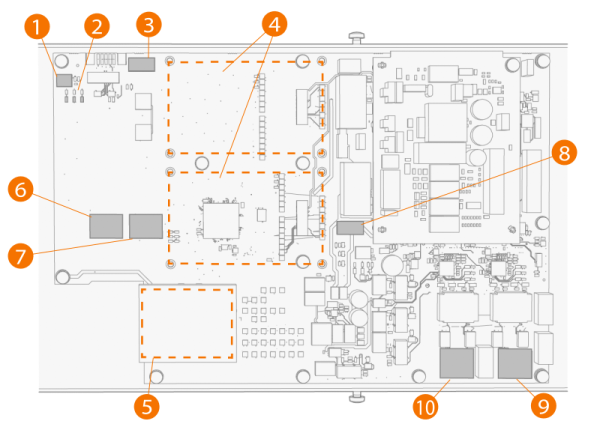
Dentro de RCM
|
3.
|
Terminal de salida rápida de sensor táctil |
|
4.
|
Ranuras para tarjeta adicional |
|
5.
|
Ranura para el módulo del bus de campo |
|
6.
|
Terminal de interruptor de puerta |
|
7.
|
Terminal de interruptor de parada |
|
8.
|
Terminal de fuente de potencia de respaldo |
|
9.
|
Puerto Ethernet 1 (LAN 1) |
|
10.
|
Puerto Ethernet 2 (LAN 2). |