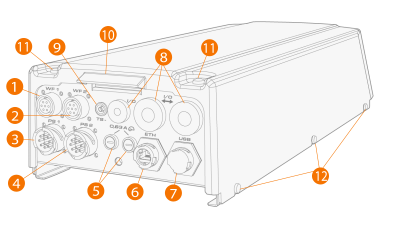
Robot Connectivity Module (RCM)
Das Robot Connectivity Module (RCM) ist für die Kommunikation zwischen Schweißsystem und Roboter zuständig.
Für Angaben zu Anschlusskabeln, siehe Verbinden der Kabel mit der Stromquelle und dem RCM.
|
1.
|
Anschluss des Drahtvorschub-Steuerkabels |
|
2.
|
Reserviert für zukünftige Verwendung |
|
3.
|
Steuerkabelanschluss der Stromquelle |
|
4.
|
Reserviert für zukünftige Verwendung |
|
6.
|
Ethernet-Port 1 (LAN 1) |
|
8.
|
Kabeleinführung (mit Tülle) |
|
9.
|
Minuspol (-) des Berührungssensors |
|
10.
|
Kabeleinführung mit Kabelklemme |
|
11.
|
Befestigungsschrauben der Abdeckung |
|
12.
|
Ausrichtungslöcher und Schrauben (zum Sichern der Abdeckung in Einbaulage). |
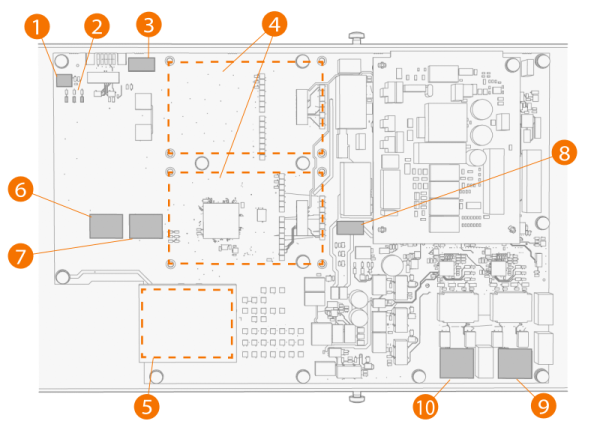
RCM Innen
|
3.
|
Anschluss Berührungssensor-Schnellausgang |
|
4.
|
Zusatzkartensteckplätze |
|
5.
|
Feldbusmodul-Steckplatz |
|
6.
|
Anschluss für Türschalter |
|
7.
|
Anschluss für Stoppschalter |
|
8.
|
Anschluss für Backup-Stromversorgung |
|
9.
|
Ethernet-Port 1 (LAN 1) |
|
10.
|
Ethernet-Port 2 (LAN 2) |