| 焊接程序 |
|
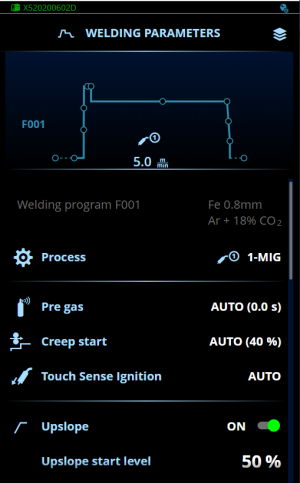
显示正在使用的焊接程序。您不能在此视图中更改焊接程序。如需更改焊接程序,请参阅 应用焊接程序。 |
工艺
|
MIG、1-MIG、Pulse、DPulse、WiseRoot+、WiseThin+、MAX Cool、MAX Speed、MAX Position |
此 MIG 焊接工艺选择取决于活动的焊接程序。
有关工艺的更多信息,请参阅功能和特性附加指南。 |
| 提前送气 |
0.0 ...9.9 s,自动,步长 0.1
0.0 = 关闭
默认 = 自动 |
在引燃电弧前开始提供保护气流的焊接功能。这确保了在焊接开始时金属不会与空气接触。时间值由用户预设。用于所有金属,但特别适合不锈钢、铝和钛。 |
| 慢送丝 |
10 ...100%,自动,步长 1
默认 = 自动 |
慢送丝功能定义了焊接电弧点燃之前(即在填充焊丝接触工件之前)的送丝速度。起弧之后,送丝速度将自动切换到正常的用户设定速度。慢送丝功能始终是打开的。 |
| Touch Sense Ignition接触传感起弧 |
自动/关闭/打开
默认 = 自动 |
Touch Sense Ignition 可将飞溅减少到最小量,并能在引弧之后立即稳定电弧。 |
| 上坡 |
打开∕关闭
默认 = 关 |
上坡这种焊接功能决定了焊接开始时焊接电流逐渐增加到所需焊接电流水平的时间。上坡开始级别和时间由用户预设。 |
| - 上坡启动级别 |
10 ...100%,自动,步长 1
默认 = 50 |
| - 上坡时间 |
0.1 ... 5 s, 自动,步长 0.1
默认 = 0.1 |
| 热启动 |
打开∕关闭
默认 = 关 |
在焊接开始时使用更打或更小送丝速度和焊接电流的焊接功能。在热起弧之后,电流变为正常焊接电流水平。这有助于开始焊接,特别是使用铝材料时。用户可以调整热起弧的级别和时间。热起弧斜率时间调整设定了从热起弧阶段到正常焊接电流水平的过渡时间。热启动微调(电压)可通过 1-MIG、脉冲、DPulse、WiseThin+ 和 MAX Speed 过程进行调节。 |
| - 热启动级别 |
-50 ... +200 %,自动,步长 1
默认 = 140 |
| - 热启动微调 |
-10.0 ... +10.0, 步长 0.1
默认 = 0 |
| - 热启动时间 |
0.1 ... 9.9 秒,自动,步长 0.1
默认 = 1.2 s |
| - 热起弧斜率时间 |
0.0 ... 10.0 s,步长 0.1 s
默认 = 0 |
| Wise 功能 |
无、WiseFusion、WisePenetration、WiseSteel |
选择后,会打开可用的 Wise 功能列表以供选择。请参阅 功能和特性附加指南 了解更多信息。
(不可用于 WiseRoot+、WiseThin+、MAX Cool、MAX Speed 和 MAX Position。) |
| 送丝速度 |
0.5 ...25 m/min,步长 0.05 或 0.1
默认 = 5.00 m/min
|
送丝速度调节。当送丝速度小于 5 m/min 时,调节步长为 0.05;当送丝速度为 5 m/min 或更快时,调节步长为 0.1。
|
| 送丝速度下限 |
最小/最大 = 0.5 ... 25 m/min,步长 0.1
默认 = 0.5 m/min |
送丝速度调节下限和上限。 |
| 送丝速度上限 |
最小/最大 = 0.5 ... 25 m/min,步长 0.1
默认 = 25 m/min |
电流
|
10 ...机器尺寸 A,步长 1
默认 = 50 A |
焊接电流调节。仅适用于 WisePenetration。 |
| 微调 |
示例:-10.0 ... +10.0 V *, 步长 0.1
|
焊接电压微调。
* 微调电压范围由活动的焊接程序定义。 |
| 动态特性 |
-10.0 ...+10.0,步长 0.2
默认 = 0 |
控制电弧的短路特性。值越小,电弧越软,值越大,电弧越硬。 |
| 机器人行走速度 |
20...2000 mm/min, 步长 1 /
由机器人控制
默认 = 由机器人控制 |
用户可以在储存通道中设定行走速度,然后传送给机器人。不过,请注意
- 机器人必须具备能够使用储存通道传输的数值的功能。
- 行走速度仍可直接在机器人程序中设置,在这种情况下,机器人程序的值会优先于从储存通道传输的值。 |
| 填弧坑 |
打开∕关闭 |
使用高功率焊接时,通常会在焊缝末端形成弧坑。填弧坑功能会在焊接作业结束时降低焊接功率/送丝速度,从而可以使用更低的功率等级填补弧坑。
填弧坑微调(电压)可通过 1-MIG、脉冲、DPulse、WiseThin+ 和 MAX Speed 工艺进行调节。 |
| - 填弧坑启动级别 |
10 ... 150 %, 自动,步长 1
默认 = 100 |
| - 填弧坑微调 |
-10.0 ... +10.0, 步长 0.1
默认 = 0 |
| - 填弧坑时间 |
0.1 ... 10.0 s,自动,步长 0.1
默认 = 1.0 s |
| - 填弧坑结束级别 |
10 ... 150 %, 自动,步长 1
默认 = 30 |
| - 填弧坑结束级别时间 |
0.1 ... 10.0 s,步长 0.1
默认 = 0.0 s |
| 滞后电流 |
-30 ...+30 |
滞后电流设置会影响焊接结束时的焊丝长度,例如,可防止焊丝停在太靠近熔池的位置。这也为下一次焊接的开始提供了最佳焊丝长度。 |
| 送丝结束步骤(WF 结束步骤) |
关/开
默认 = 关 |
送丝结束步骤功能可防止焊接结束时填充焊丝粘在导电嘴上。 |
| 滞后停气 |
0.0 ...9.9 s,自动,步长 0.1
0.0 = 关闭
默认 = 自动 |
在电弧熄灭后继续提供保护气流的焊接功能。这确保了在电弧熄灭后焊缝不会与空气接触,从而保护焊缝和焊丝。用于所有金属。特别是不锈钢和钛需要更长的滞后停气时间。 |